E. HIGGINS, L. SCHERGER
We created our prosthetic hand prototype using the NXT Robotic Lego kit powered by LabView software. The final design was robust enough to pick up a cup of water, but delicate enough to pick up a raspberry without squishing it.
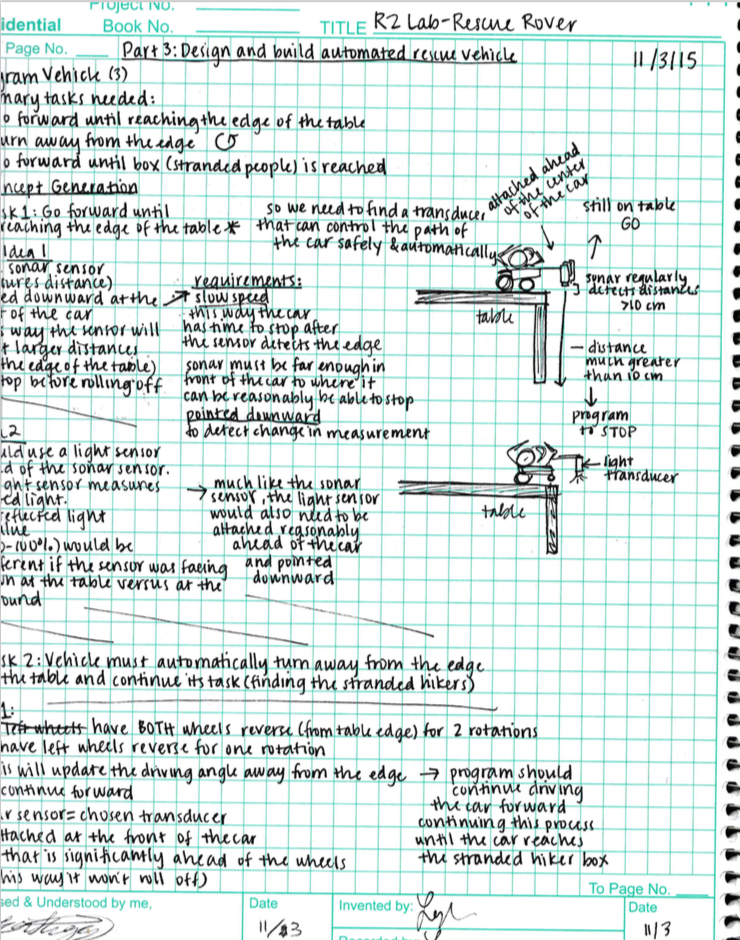
To familiarize ourselves with LabView, we completed an intro project to build a rescue rover. The protoype had to roll around the table while picking up ping pong balls without falling off any edge of the table. We achieved this by incorporating a touch sensor and ultrasonic sensor at the front of the rover, which were controlled by set thresholds on LabView. The design decisions made in the rescue rover mission were carried forward to the design of the prosthetic hand.

Design concept ideation to choose sensors appropriate for the mission; the rover must recognize ping pong balls and keep itself from falling off the table
Evaluating design concepts on feasibility and accuracy

Physical design concept of the rover

Physical design concept for the prosthetic hand gripper